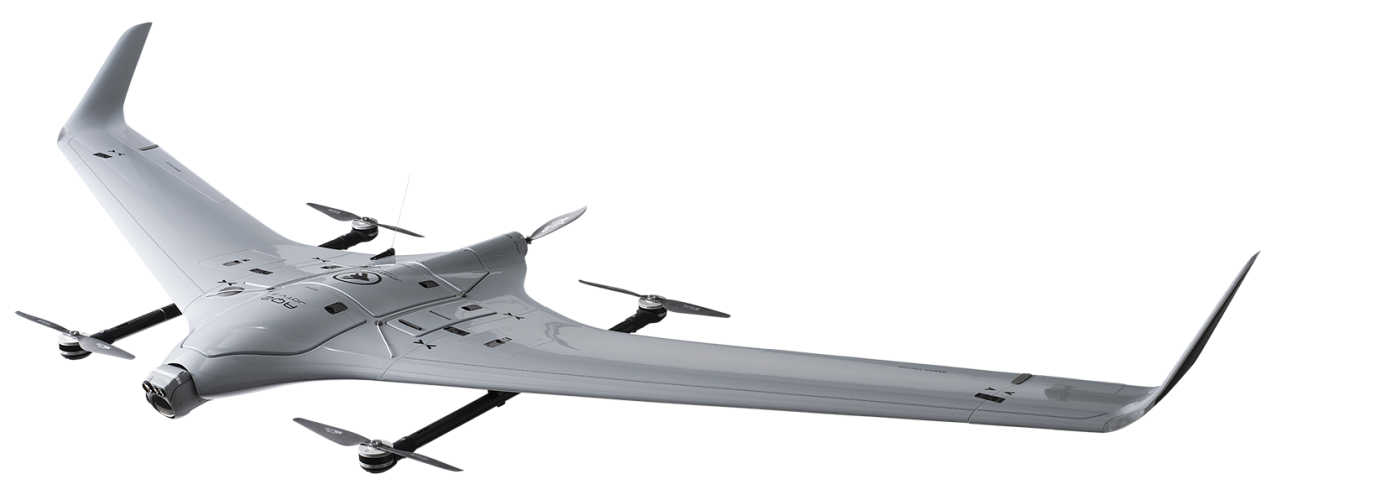
SQA eVTOL
SQA eVTOL multirole system is an evolutionary and compact small unmanned system developed by C-ASTRAL advanced X-WORKS laboratory enabling the complete spectrum of ISR operations over medium distances of up to 40 km from the ground control station. The SQA eVTOL can be equipped with several different command and control datalinks at frequencies from 1GHz up to 5GHz in MANET or MIMO configurations.
Details